
Autonomous boats could be your next ride
by Rachel Gordon | MIT CSAIL, MIT News
Five years in the making, MIT’s autonomous floating vessels get a size upgrade and learn a new way to communicate aboard the waters.
The feverish race to produce the shiniest, safest, speediest self-driving car has spilled over into our wheelchairs, scooters, and even golf carts. Recently, there’s been movement from land to sea, as marine autonomy stands to change the canals of our cities, with the potential to deliver goods and services and collect waste across our waterways.
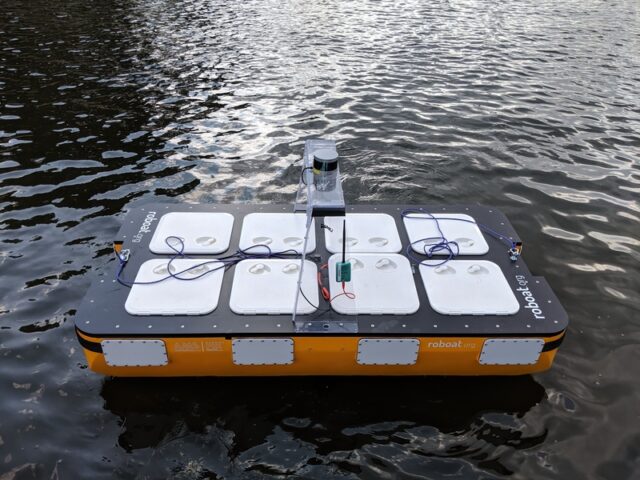
In an update to a five-year project from MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) and the Senseable City Lab, researchers have been developing the world's first fleet of autonomous boats for the City of Amsterdam, the Netherlands, and have recently added a new, larger vessel to the group: “Roboat II.” Now sitting at 2 meters long, which is roughly a “Covid-friendly” 6 feet, the new robotic boat is capable of carrying passengers.
Alongside the Amsterdam Institute for Advanced Metropolitan Solutions, the team also created navigation and control algorithms to update the communication and collaboration among the boats.
“Roboat II navigates autonomously using algorithms similar to those used by self-driving cars, but now adapted for water,” says MIT Professor Daniela Rus, a senior author on a new paper about Roboat and the director of CSAIL. “We’re developing fleets of Roboats that can deliver people and goods, and connect with other Roboats to form a range of autonomous platforms to enable water activities.”
Self-driving boats have been able to transport small items for years, but adding human passengers has felt somewhat intangible due to the current size of the vessels. Roboat II is the “half-scale” boat in the growing body of work, and joins the previously developed quarter-scale Roboat, which is 1 meter long. The third installment, which is under construction in Amsterdam and is considered to be “full scale,” is 4 meters long and aims to carry anywhere from four to six passengers.
Aided by powerful algorithms, Roboat II autonomously navigated the canals of Amsterdam for three hours collecting data, and returned back to its start location with an error margin of only 0.17 meters, or fewer than 7 inches.
“The development of an autonomous boat system capable of accurate mapping, robust control, and human transport is a crucial step towards having the system implemented in the full-scale Roboat,” says senior postdoc Wei Wang, lead author on a new paper about Roboat II. “We also hope it will eventually be implemented in other boats in order to make them autonomous.”
Wang wrote the paper alongside MIT Senseable City Lab postdoc Tixiao Shan, research fellow Pietro Leoni, postdoc David Fernandez-Gutierrez, research fellow Drew Meyers, and MIT professors Carlo Ratti and Daniela Rus. The work was supported by a grant from the Amsterdam Institute for Advanced Metropolitan Solutions in the Netherlands. A paper on Roboat II will be virtually presented at the International Conference on Intelligent Robots and Systems.
To coordinate communication among the boats, another team from MIT CSAIL and Senseable City Lab, also led by Wang, came up with a new control strategy for robot coordination.
This article first appeared at MIT News on Oct 26, 2020.
